Interval Coding
Axon encodes scalars values into pairs of spikes. The time difference between the 2 spikes in a pair, also called the Inter Spike Interval (ISI), relates to the encoded value. The DataEncoder class is responsible for encoding values into spikes and decoding them back.
This document highlight how this encoding and decoding process works.
scalar values into inter-spike intervals (ISIs) and decoding them back. This functionality is central to how Axon implements symbolic computation using the STICK (Spike Time Interval Computational Kernel) framework.
This document explains how Axon implements the interval-based encoding and computation as defined by the STICK (Spike Time Interval Computational Kernel) model.
Concept
In Axon, numerical values are encoded in the time difference between two spikes. Other neuromorphic models use encoding schemes such as spike rates or voltage values. However, time-encoding has the following advantages:
- Keeps the sparsity of spike events and hence enables ultra-low power consumption.
- Allows for high numeric resolution by using time domain while keeping spikes as binary events.
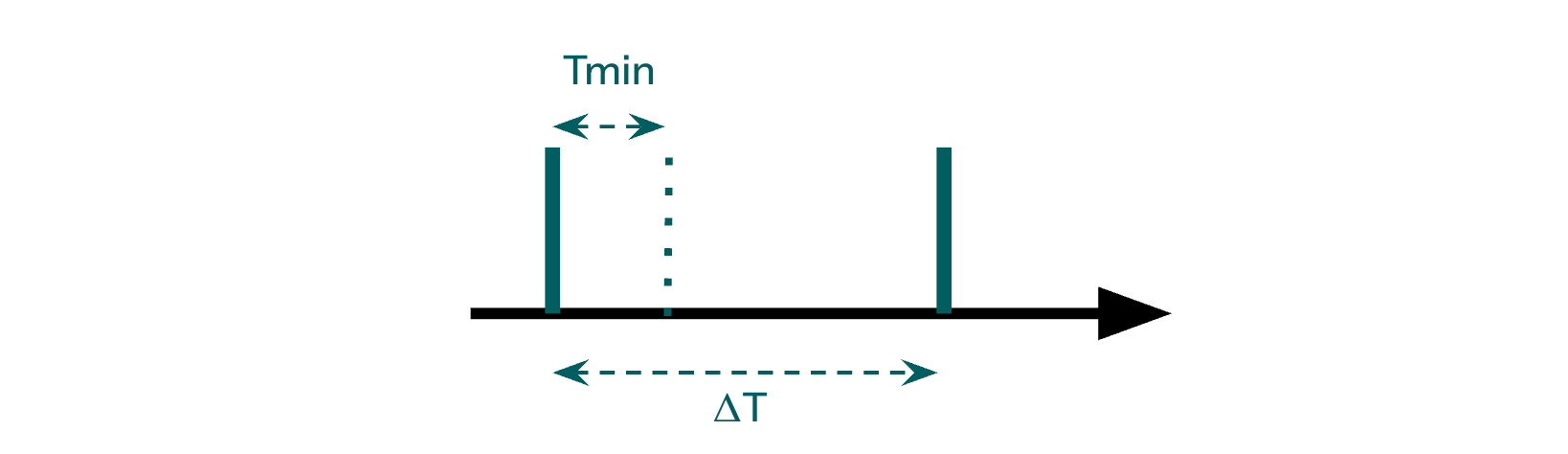
Values x ∈ [0,1] are encoded in the time difference Δt between two spikes:
ΔT = Tmin + x * Tcod
x = (ΔT − Tmin) / Tcod
where:
Tmin: minimum time differenceTcod: coding intervalΔT: time difference between two spikes
As a consequence, Tmax = Tmin + Tcod.
Default coding values are:
| Parameter | Numeric value (ms) | Meaning |
|---|---|---|
Tmin | 10.0 | Spiking threshold |
Tcod | 100.0 | Voltage after reset |
Tmax | 110.0 | Membrane integration constant |
Example:
ΔT(0.6) = 10 ms + 0.6 * 100 ms = 70 ms
Interval-based Computation
Spiking networks are built to process interval-encoded values. The network dynamics are governed by the synaptic weights and delays, allowing for complex computations based on the timing of spikes.
- Value
xis represented by timing between spikes Δt. - Spiking networks manipulate these intervals via synaptic delays, integration, and gating, executing operations like addition, multiplication, and memory.
DataEncoder Class
The DataEncoder class provides methods for encoding and decoding values:
class DataEncoder:
def __init__(self, Tmin=10.0, Tcod=100.0):
...
def encode_value(self, value: float) -> tuple[float, float]:
...
def decode_interval(self, spiking_interval: float) -> float:
...
The DataEncoder is used during simulation and output processing:
from axon_sdk.simulator import Simulator
from axon_sdk.encoders import DataEncoder
encoder = DataEncoder(Tmin=10.0, Tcod=100.0)
spike_pair = encoder.encode_value(0.6)
spike_pair
>> (0.0, 70.0)

This spike pair can then be injected into the network, and the simulator will handle the timing based on the encoded intervals.
sim.apply_input_value(value=0.6, neuron=input_neuron)
Output Decoding
interval = spike_pair[1] - spike_pair[0]
decoded_value = encoder.decode_interval(interval)
decoded_value
>> 0.6